机器人模型URDF
机器人模型URDF
rviz2显示机器人模型教程
rviz2是一个重要的话题查看工具,可以显示设计的机器人模型,本实验向导阐明具体步骤
1.创建功能包
- 创建空间(已有该空间可以跳过)
1 2
mkdir -p ~/ros2_ws/src cd ~/ros2_ws/src
- 创建包
1 2 3
cd ~/ros2_ws/src ros2 pkg create --build-type ament_cmake imu_robot_display \ --dependencies rclcpp robot_state_publisher urdf rviz2
- 创建目录
1 2
cd imu_robot_display mkdir -p urdf launch rviz
- 创建urdf文件
1
touch urdf/imu_robot.urdf
编辑文件 查看完整URDF文件
- 创建启动文件
1
touch launch/display.launch.py
打开文件,输入以下内容:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
from launch import LaunchDescription
from launch_ros.actions import Node
from ament_index_python.packages import get_package_share_directory
import os
def generate_launch_description():
pkg_path = get_package_share_directory('imu_robot_display')
urdf_file = os.path.join(pkg_path, 'urdf', 'imu_robot.urdf')
return LaunchDescription([
Node(
package='robot_state_publisher',
executable='robot_state_publisher',
name='robot_state_publisher',
output='screen',
arguments=[urdf_file]),
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
output='screen',
arguments=['-d', os.path.join(pkg_path, 'rviz', 'config.rviz')])
])
- 配置空间 在CMakeLists.txt中添加安装指令:
1 2 3 4
install( DIRECTORY urdf lanuch DESTINATION share/${PROJECT_NAME} ) - 编译 进入空间
1 2
cd ~/ros2_ws colcon build
2.运行
1 2 3
cd ~/ros2_ws/ source install/setup.bash ros2 launch imu_robot_display display.launch.py
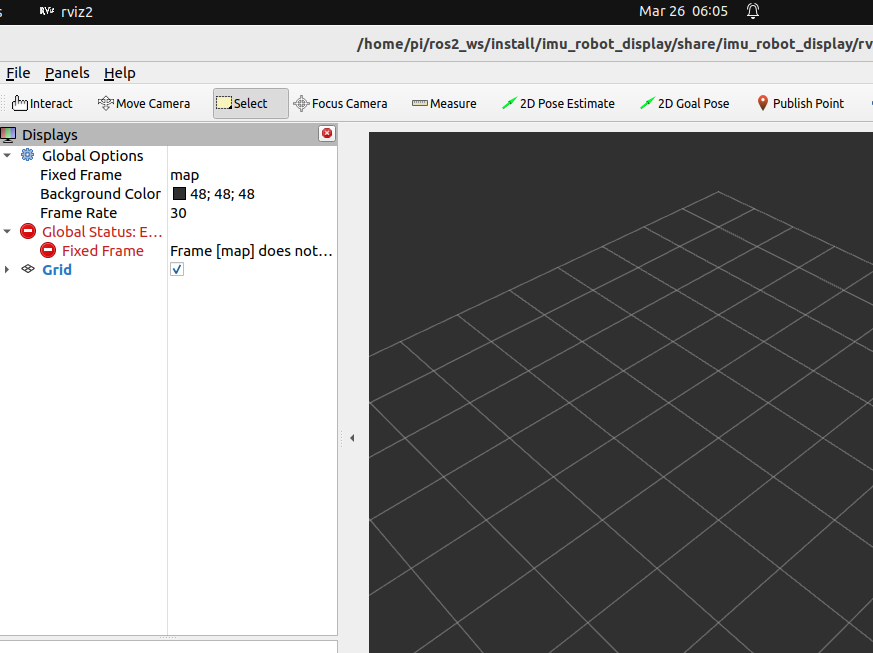
弹出如下界面
 选择 fixed frame ->base_link 选择add->robotmodel ,如图所示
选择 fixed frame ->base_link 选择add->robotmodel ,如图所示 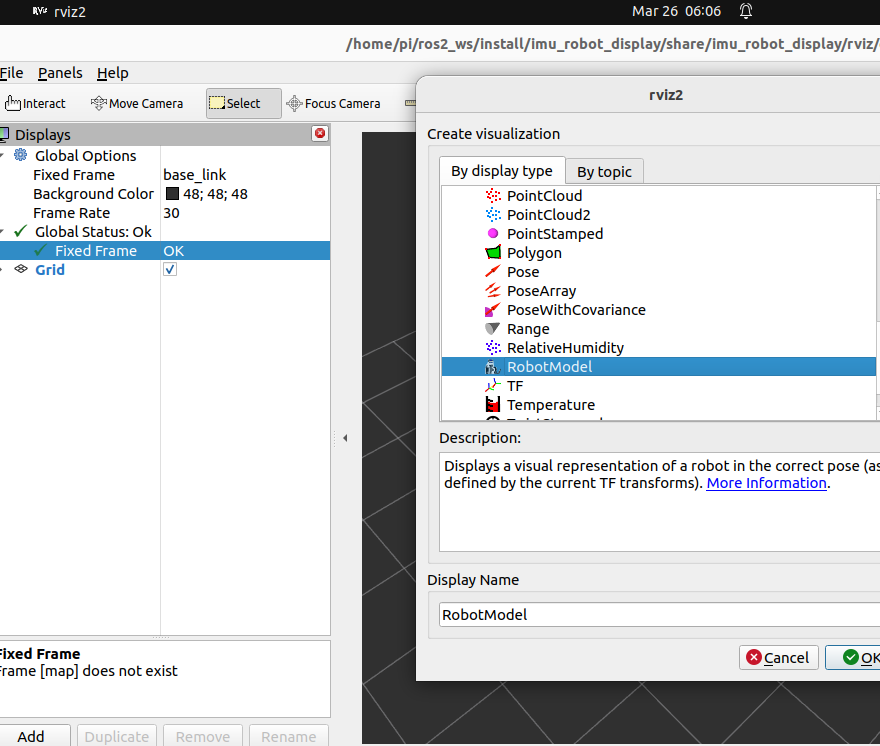 选择Description topic –>robot description 如图所示
选择Description topic –>robot description 如图所示 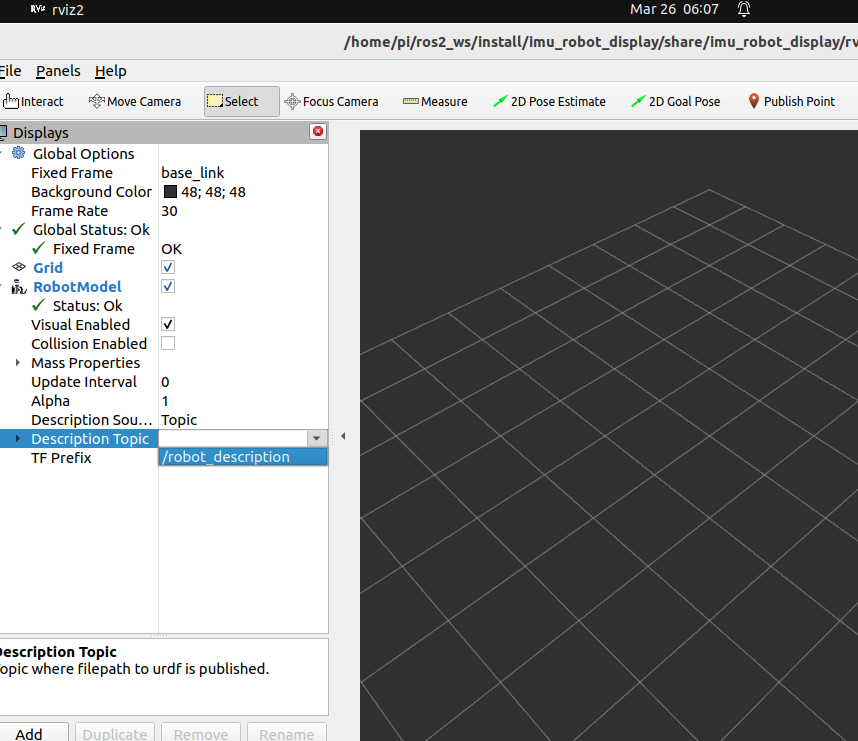 最终得到如图所示界面
最终得到如图所示界面 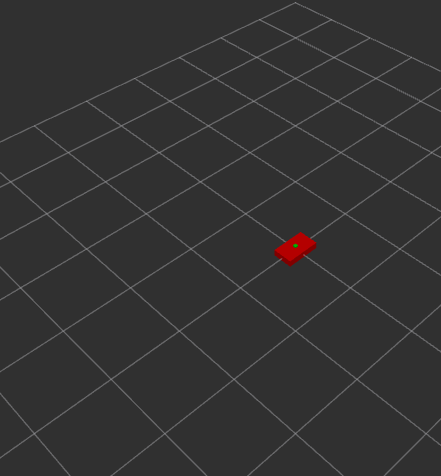
- 注意 如果报错未找到robot_state_publisher,请自行安装robot_state_publisher
This post is licensed under CC BY 4.0 by the author.