机器人虚拟仿真
机器人虚拟仿真
全向移动机器人仿真系统
全向移动机器人仿真系统不仅是技术验证的核心工具,更是实现低成本、高效率研发的关键支撑,尤其在动态环境适应性测试具有不可替代性。
1.配置虚拟机
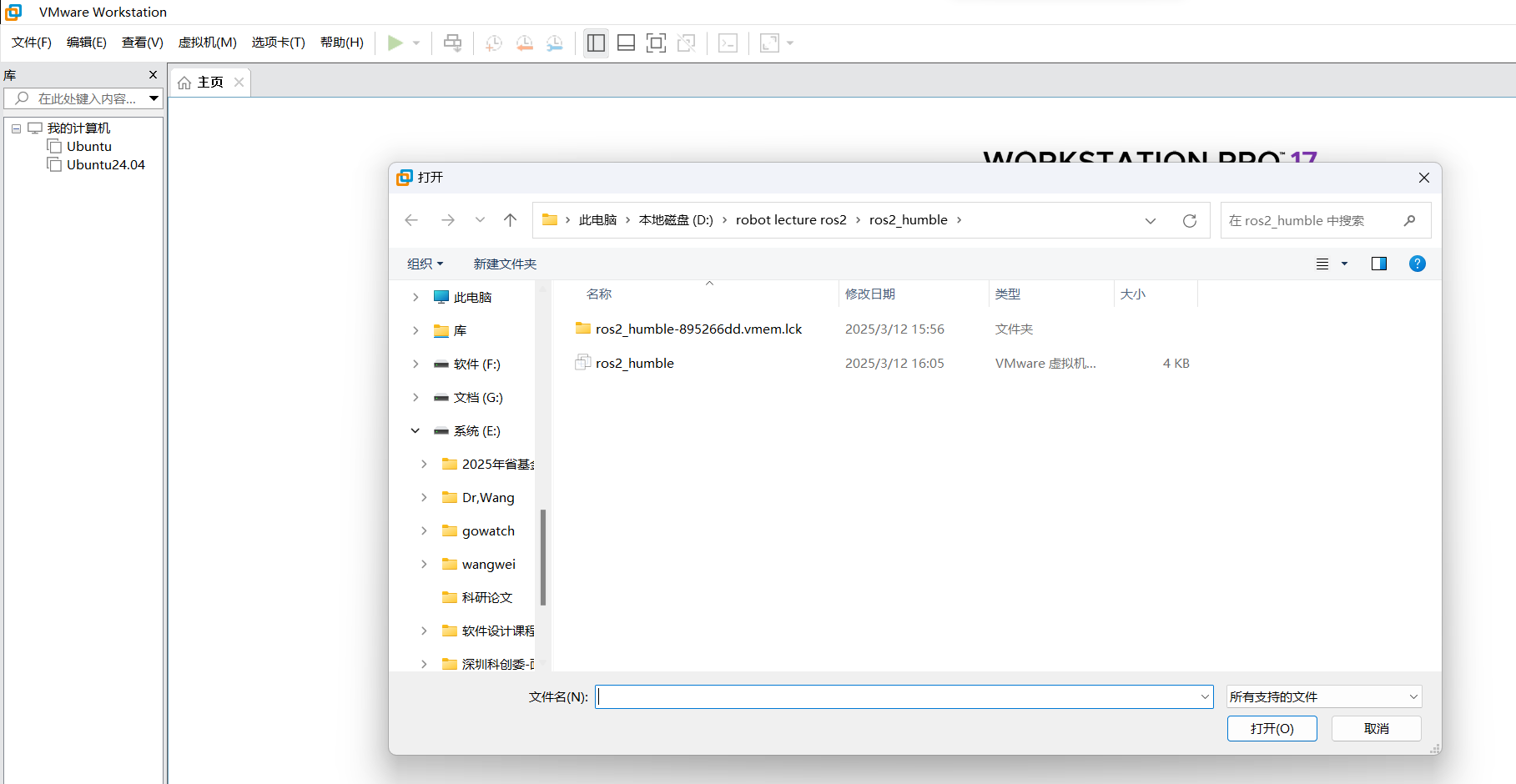
- 镜像文件位置 首先确认镜像文件的位置,位于D://robot lecture ros2/ ros2_humble ,在vm虚拟机中打开文件,如图所示
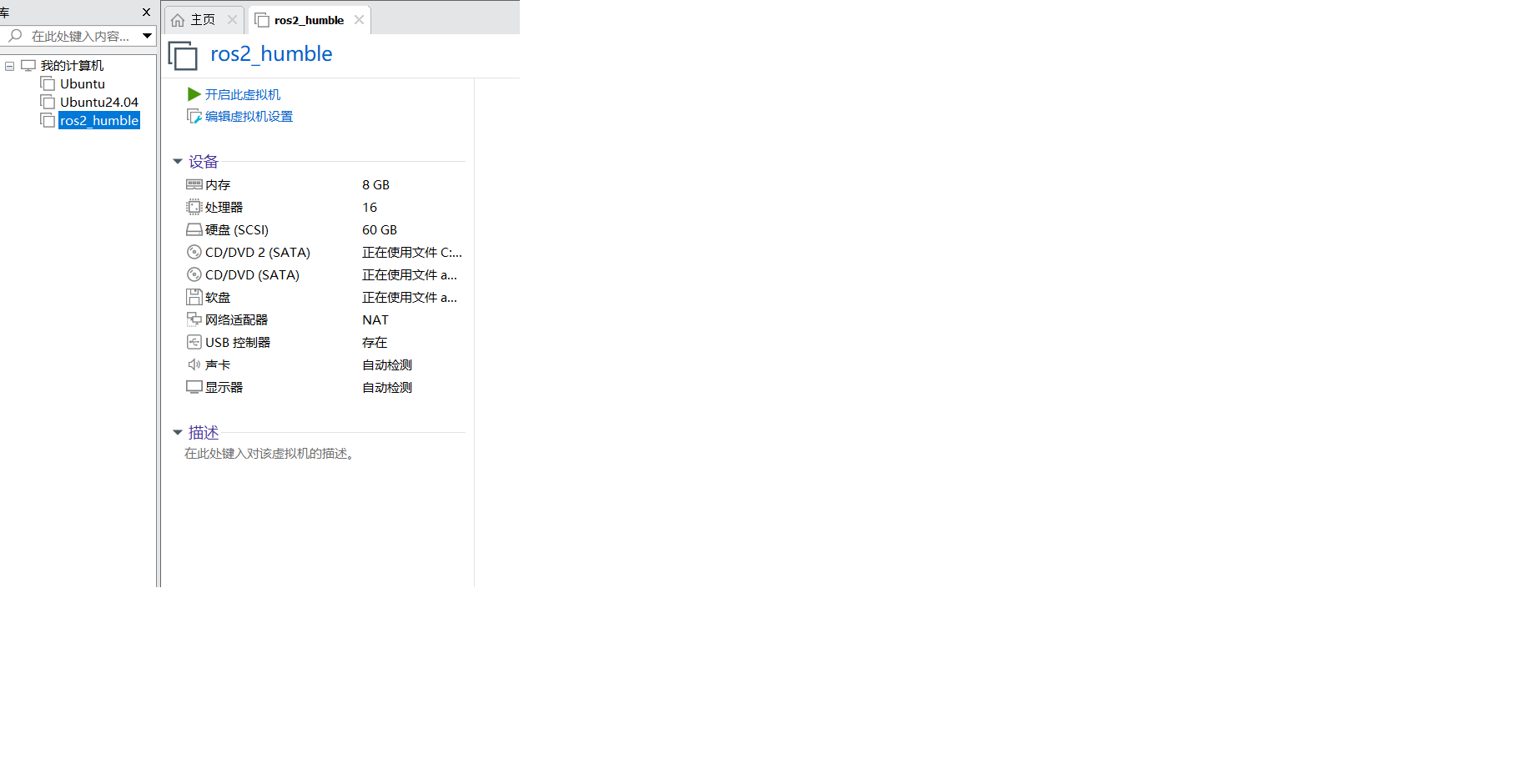
- 修改内存 为了仿真环境不卡顿,运行流畅,请将虚拟机的内存设置为8GB或者更高,CPU核心设置为16(本次操作只需要执行一次),如图所示
2.运行仿真
拷贝仿真工程到虚拟机 从学习通下载仿真工程文件夹omni_ws.zip,将其传输到虚拟机中,解压(本次操作只需要执行一次)
- 熟悉仿真工程 打开omni_ws,我们可以发现其是一个ROS2的功能包,你们有两个脚本文件:clear.sh和rebuild.sh,clear.sh是清除仿真环境脚本,当仿真环境出现异常时运行该脚本,一般不运行。rebuild.sh是编译脚本,一般运行一次即可。如图所示
- 执行启动 打开终端,输入以下指令:
1 2
source install/setup.bash ros2 launch omni_gazebo simulation.py
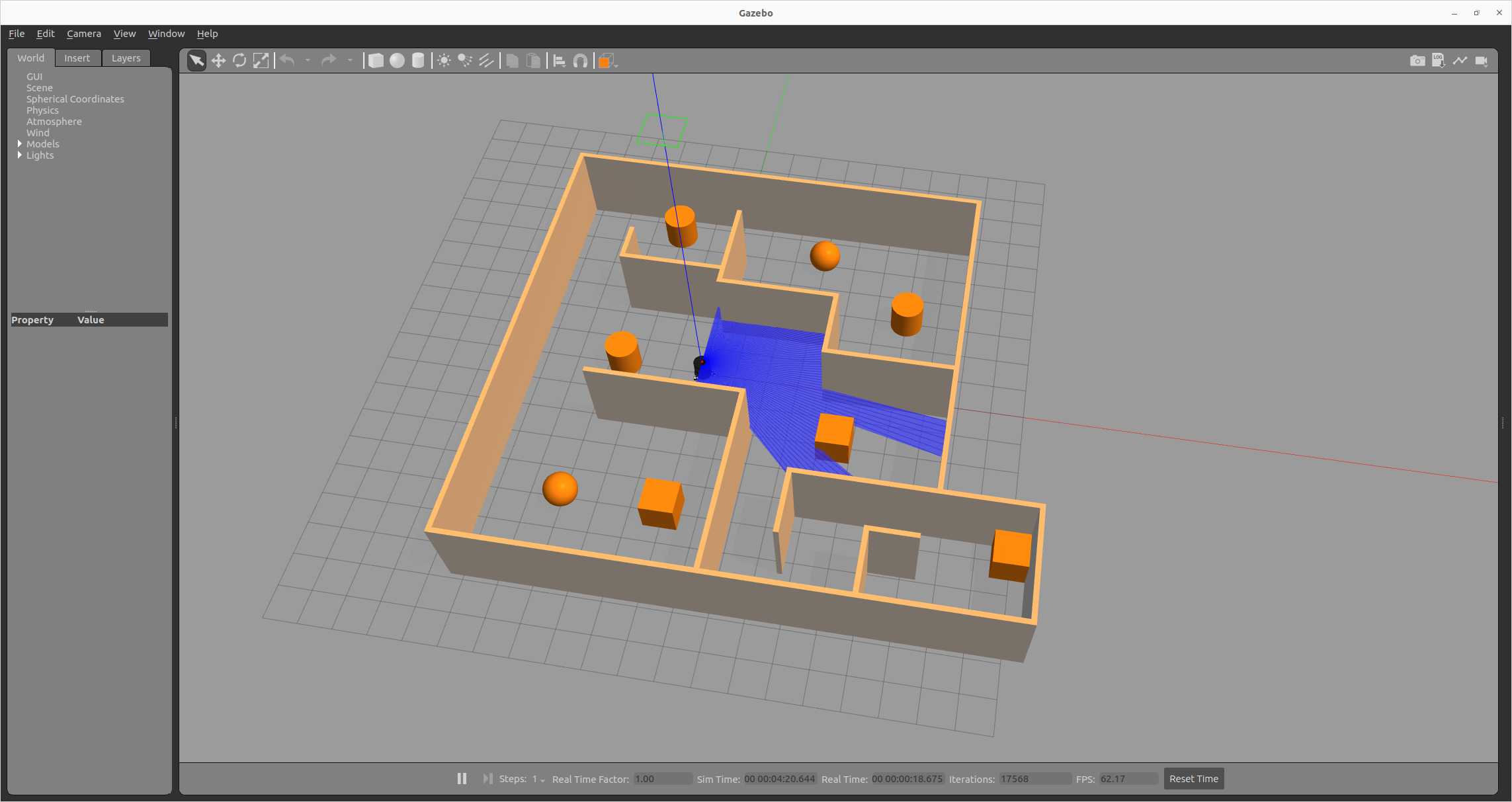
出现如图所示界面
3.控制
- 控制虚拟机器人运行 另外打开一个终端,输入
1
ros2 run teleop_twist_keyboard teleop_twist_keyboard
你可以使用这些键来控制机器人的移动和旋转:
箭头键:控制机器人的前后左右移动。 W, A, S, D:分别控制机器人的前进、左转、后退、右转。 I, J, K, L:在全向模式(Holonomic mode)下使用,允许同时控制机器人的前后左右移动。 U, O, J, L:在全向模式下,分别控制机器人的前进、后退、左转、右转。 T, B:分别控制机器人上升和下降。 Q/Z:强制停止机器人。 C:清除到姿势(在某些情况下有用,比如在仿真环境中)。
This post is licensed under CC BY 4.0 by the author.