ROS2话题订阅实验指导书---cmd(C++)
基于T-bot底盘实验指导书---话题订阅
1.考核目标
1.1 实验原理
本实验主要考核消息的订阅功能的理解与应用。在 ROS(机器人操作系统)中,机器人通过消息传递进行节点之间的通信。通过小乌龟实验,我们了解到通过键盘控制小乌龟的运动,其核心在于 ROS 系统中存在一个节点teleop_twist_keyboard,产生了话题 /cmd_vel 。小乌龟订阅了 /cmd_vel 话题后,能够根据接收到的速度指令进行运动。因此,通过订阅 /cmd_vel 消息,我们可以实现机器人的运动控制。
结点运行 输入如下指令 ros2 run teleop_twist_keyboard teleop_twist_keyboard 启动键盘控制结点,该结点是系统默认自带的,不需要我们去编写这个结点。
消息类型 单独打开终端,通过查看/cmd_vel,终端中输入ros2 topic info /cmd_vel获得该话题的类型
Type:geometry_msgs/msg/Twist Publisher count: 1 Subscription count: 0 关于twist指令可以参考twist官方解释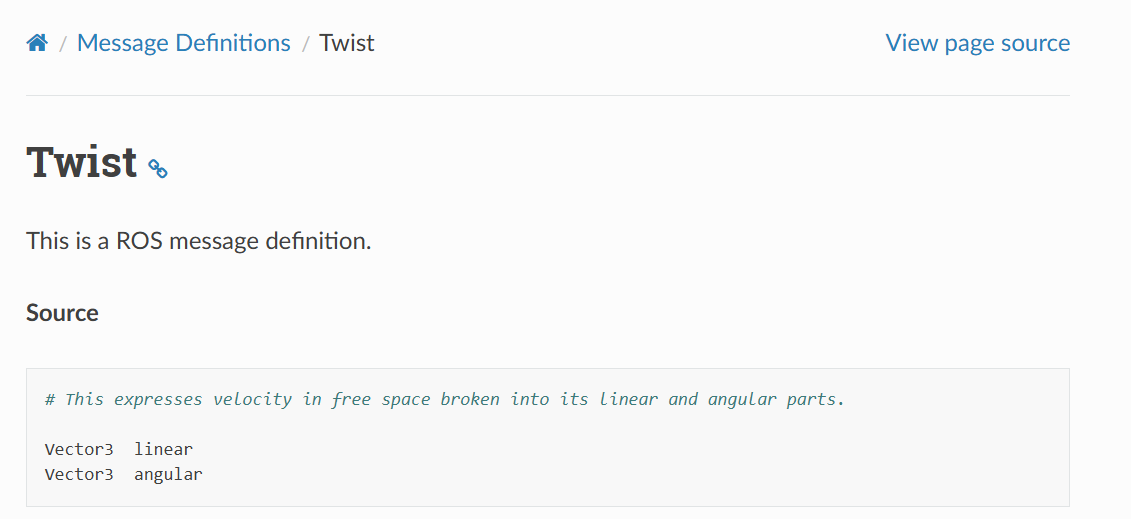
1.2 实验目标
- 创建消息订阅者:制作一个 ROS 节点,订阅
/cmd_vel消息。 - 实现小车移动控制:根据接收到的速度和角度指令,实现小车的移动控制。
- 验证响应能力:测试小车在不同速度和方向命令下的响应能力,确保其能够按预期进行移动。
- 数据记录与分析:记录实验过程中小车的运动数据,以便进行后续分析。
2.实验步骤
2.1创建包
首先在/home/pi目录下创建一个文件夹,名称自拟,打开终端,输入如下指令
1
2
mkdir -p xxx/src
cd xxx/src
其中xxx为自建文件夹 在home/pi/xxx/src 目录创建一个名为 my_base 的包:
1
ros2 pkg create --build-type ament_cmake my_base
2.2编写订阅者节点代码
新建一个cpp文件,命名为my_base.cpp,文件引用头文件bot_serial.h, my_base.cpp和bot_serial.h文件内容可以参考~/wangwei/src/my_base/src文件夹下的 文件,当然你也可以直接复制过去。 接下来分析相关文件的具体功能: 该头文件中定义了下发指令的结构体和基本类
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
#define SEND_DATA_CHECK 1
#define READ_DATA_CHECK 0
#define FRAME_HEADER 0X7B //Frame head
#define FRAME_TAIL 0X7D //Frame tail
#define RECEIVE_DATA_SIZE 24
#define SEND_DATA_SIZE 11
#define PI 3.1415926f //PI //圆周率
typedef struct _SEND_DATA_
{
uint8_t tx[SEND_DATA_SIZE];
float X_speed;
float Y_speed;
float Z_speed;
unsigned char Frame_Tail;
}SEND_DATA;
该结构体描述了ROS系统下发指令的详细细节,分析可知,控制X轴、y轴、Z轴速度的下发 便可以完成移动底盘运动的控制。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
class turn_on_robot : public rclcpp::Node
{
public:
turn_on_robot(); //Constructor //构造函数
~turn_on_robot(); //Destructor //析构函数
void Control(); //Loop control code //循环控制代码
serial::Serial Stm32_Serial; //Declare a serial object //声明串口对象
private:
rclcpp::Time _Now, _Last_Time; //Time dependent, used for
float Sampling_Time;
RECEIVE_DATA Receive_Data;
SEND_DATA Send_Data;
bool Get_Sensor_Data_New();
unsigned char Check_Sum(unsigned char Count_Number,unsigned char mode);
//check function //校验函数
short IMU_Trans(uint8_t Data_High,uint8_t Data_Low);
//IMU data conversion read //IMU数据转化读取
float Odom_Trans(uint8_t Data_High,uint8_t Data_Low);
//Odometer data is converted to read //里程计数据转化读取
};
为了建立底盘与ROS系统之间的联系,有必要建立一个类,并在内中定义串口接serial::Serial Stm32_SerialStm32_Serial,其中Get_senosr_Data_New()函数与Check_Sum()函数不属于考核点,老师已经实现了,直接调用即可。学生需要完成类的构造函数turn_on_robot()和Control()函数
my_base.c主要由四个函数,请将以下四个函数拷贝到文件中,并实现缺失的代码。
- 函数1
1 2 3 4 5 6 7 8
#include "bot_serial.h" int main(int argc, char **argv) { rclcpp::init(argc, argv); turn_on_robot Robot_Control;//Instantiate an object //实例化一个对象 Robot_Control.Control(); rclcpp::shutdown(); return 0; }
- 函数2
可见,我们同时需要在my_base.c文件中需要实现Robot_Control.Control()函数,该函数的模板如下:
1
2
3
4
5
6
7
8
9
10
11
12
13
14
void turn_on_robot::Control()
{
while(rclcpp::ok())
{
try
{
rclcpp::spin_some(this->get_node_base_interface());
}
catch (const rclcpp::exceptions::RCLError & e )
{
RCLCPP_ERROR(this->get_logger(),"unexpectedly failed whith %s",e.what());
}
}
}
- 函数3
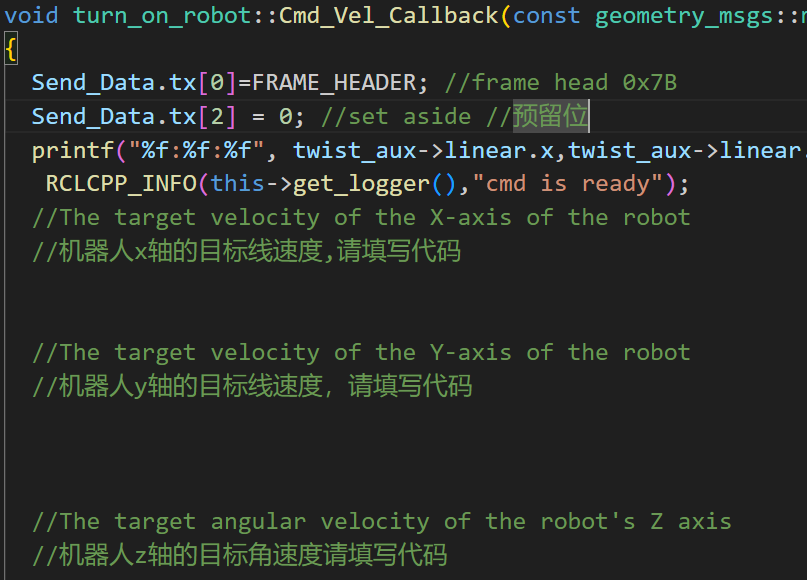
我们需要重点完成的是订阅完消息后的回调函数如何实现
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
void turn_on_robot::Cmd_Vel_Callback(const geometry_msgs::msg::Twist::SharedPtr twist_aux)
{
Send_Data.tx[0]=FRAME_HEADER; //frame head 0x7B
Send_Data.tx[2] = 0; //set aside //预留位
printf("%f:%f:%f", twist_aux->linear.x,twist_aux->linear.x,twist_aux->angular.z);
RCLCPP_INFO(this->get_logger(),"cmd is ready");
//The target velocity of the X-axis of the robot
//机器人x轴的目标线速度,请填写代码
//The target velocity of the Y-axis of the robot
//机器人y轴的目标线速度,请填写代码
//The target angular velocity of the robot's Z axis
//机器人z轴的目标角速度请填写代码
// Send_Data.tx[9]=Check_Sum(9,SEND_DATA_CHECK);
// Send_Data.tx[10]=FRAME_TAIL; //frame tail 0x7D
// try
// {
// Stm32_Serial.write(Send_Data.tx,sizeof (Send_Data.tx));
// }
// catch (serial::IOException& e)
// {
// RCLCPP_ERROR(this->get_logger(),("Unable to send data through serial port"));
// }
}
- 函数4
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
turn_on_robot::turn_on_robot():rclcpp::Node ("wheeltec_robot") { Cmd_Vel_Sub = create_subscription<geometry_msgs::msg::Twist>( "cmd_vel", 2, std::bind(&turn_on_robot::Cmd_Vel_Callback, this, _1)); RCLCPP_INFO(this->get_logger(),"wheeltec_robot Data ready"); //Prompt message //提示信息 // try // { // Stm32_Serial.setPort("/dev/ttyACM0"); //Select the serial port number to enable //选择要开启的串口号 // Stm32_Serial.setBaudrate(115200); //Set the baud rate //设置波特率 // serial::Timeout _time = serial::Timeout::simpleTimeout(2000); //Timeout //超时等待 // Stm32_Serial.setTimeout(_time); // Stm32_Serial.open(); //Open the serial port //开启串口 // } // catch (serial::IOException& e) // { // RCLCPP_ERROR(this->get_logger(),"wheeltec_robot can not open serial port,Please check the serial port cable! "); //If opening the serial port fails, an error message is printed //如果开启串口失败,打印错误信息 // } // if(Stm32_Serial.isOpen()) // { // RCLCPP_INFO(this->get_logger(),"wheeltec_robot serial port opened"); //Serial port opened successfully //串口开启成功提示 // } }
2.3修改package.xml
进入ros2_ws/src/my_base目录并打开package.xml,按照之前教程要求填写description ,maintainer和license.如果你并不想开源你的代码,可以忽略此步。
1
2
3
<description>TODO: Package description</description>
<maintainer email="nxrobo@todo.todo">nxrobo</maintainer>
<license>TODO: License declaration</license>
在编译工具依赖ament_cmake后
1
<buildtool_depend>ament_cmake</buildtool_depend>
添加下列依赖项:
1
2
<depend>rclcpp</depend>
<depend>std_msgs</depend>
改写完毕后注意记得保存文档!
2.4修改CmakeLists.txt
打开 CMakeLists.txt ,在 find_package(ament_cmake REQUIRED) 下添加两行:
1
2
3
4
5
6
7
find_package(rclcpp REQUIRED)
find_package(geometry_msgs REQUIRED)
find_package(tf2_geometry_msgs REQUIRED)
find_package(serial REQUIRED)
add_executable(my_base src/my_base.cpp)
ament_target_dependencies(my_base rclcpp serial tf2_geometry_msgs)
3.编译运行
打开终端,执行如下命令: 执行colcon build 执行 source install/setup.bash 执行 ros2 run my_base my_base
4.测试验证
上述步骤正确,再打开终端,启动键盘节点,输入指令,则my_base节点会响应, 如图所示: 
5.回调函数中完成代码整合
如图所示,完成代码编写