雷达部署
雷达部署
雷达部署教程
激光雷达作为机器人重要的传感器,在建图导航等领域具有重要作用
1.升级树莓派相关配置
- 更新资源包 参考学习通–工具资料–2025-3-27-树莓派系统更新.pdf文件,根据教程完成系统更新
2.代码验证
- 拷贝雷达驱动 首先下载雷达驱动,位于学习通–工具资料–雷达ros2驱动包,拷贝到树莓派,解压到工程目录src下(如果你之前创建的工程名称为XXX,则拷贝到XXX/src,和my_base同级目录)
- 查看雷达驱动串口号
1 2
ls /dev/ttyA* sudo chmod 777 /dev/ttyA*
观察雷达驱动使用的串口号,(下一步需要使用)
- 编译 打开终端,输入以下指令:
1
colcon build
3.控制
- 修改端口号 找到/src/LSLIDAR_X_ROS2-20240228/src/lslidar_driver/params/lidar_uart_ros2/lsn10p.yaml,打开如图所示,修改serial_port_为正确的号
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
/lslidar_driver_node: ros__parameters: frame_id: laser #激光坐标 group_ip: 224.1.1.2 add_multicast: false device_ip: 192.168.1.200 #雷达源IP device_ip_difop: 192.168.1.102 #雷达目的ip msop_port: 2368 #雷达目的端口号 difop_port: 2369 #雷达源端口号 lidar_name: N10_P #雷达选择:M10 M10_P M10_PLUS M10_GPS N10 L10 N10_P angle_disable_min: 120.0 #角度裁剪开始值 angle_disable_max: 230.0 #角度裁剪结束值 min_range: 0.2 #雷达接收距离最小值 max_range: 200.0 #雷达接收距离最大值 use_gps_ts: false #雷达是否使用GPS授时 scan_topic: /scan #设置激光数据topic名称 interface_selection: serial #接口选择:net 为网口,serial 为串口。 serial_port_: /dev/ttyACM0 #串口连接时的串口号 high_reflection: false #M10_P雷达需填写该值,若不确定,请联系技术支持。 compensation: false #M10系列是否使用角度补偿功能 pubScan: true #是否发布scan话题 pubPointCloud2: false #是否发布pointcloud2话题 pointcloud_topic: /lslidar_point_cloud
- 运行Launch文件
1 2 3
colcon build source install/setup.bash ros2 launch lslidar_driver lsn10p_launch.py
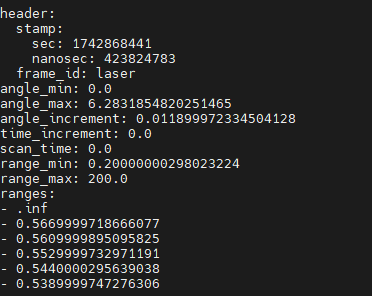
另开开一个终端,查看scan话题
1
ros2 topic echo /scan
This post is licensed under CC BY 4.0 by the author.