里程计
里程计

实验指导书
姓名: ______________
学号: ______________
专业: ______________
班级: ______________
1.项目名称
移动机器里程计实践
2.背景
在移动机器人领域,里程计(Odometry)是评估机器人位置和运动的重要技术。里程计通过测量轮子的旋转或传感器数据,计算出机器人在环境中的移动轨迹。随着机器人技术的发展,里程计在自主导航、路径规划和环境感知等方面发挥着越来越重要的作用。本实验旨在加深对移动机器人运动学的理解,为后续的机器人控制和应用打下坚实的基础。通过理论与实践相结合的方式,学生将能够掌握移动机器人的基本运动学原理,并培养解决实际问题的能力。
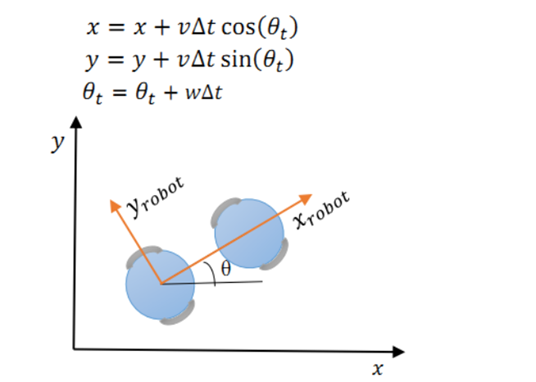
3.理论知识
4.实验过程
4.1实验前准备
1. 准备控制板工程代码
- 选择开发环境:
- 确保选择合适的开发环境,例如 STM32CubeIDE 或 Keil MDK。
- 获取代码库:
- 从深职学习通或其他代码托管平台下载所需的控制板工程代码。
- 配置项目:
- 根据硬件配置,调整工程设置和代码中的参数。
2. 准备下载器
- 选择下载器:
- 根据控制板选择合适的下载器:
- ST-Link:适用于 STM32 系列微控制器。
- J-Link:适用于多种微控制器,支持更广泛的设备。
- 根据控制板选择合适的下载器:
- 安装驱动:
- 对于 ST-Link,安装 STM32 ST-LINK Utility。
- 对于 J-Link,安装 J-Link Software and Documentation Pack.
3. 连接下载器
- 连接下载器到控制板:
- 使用相应的连接线将 ST-Link 或 J-Link 连接到控制板。
- 确保连接正常:
- 检查连接是否牢固,并确认电源供应正常。
4. 安装完整的机器人
- 选择机器人类型:
- 根据项目需求,选择合适的机器人平台(如 Raspberry Pi 等)。
- 安装操作系统:
- 对于基于 Linux 的机器人,安装适合的 Linux 发行版(如 Ubuntu)。
- 配置环境:
- 安装必要的软件
4.2实验步骤
Step 1: 熟悉工程项目
- 打开工程项目文件:
- 检查项目结构,包括文件夹和主要源文件,确保所有依赖项正确配置。
- 分析程序的定时周期:
- 确定各模块的定时调用关系,记录定时周期,以理解程序的实时性要求。
- 确定时间间隔:
- 计算合适的时间间隔,为后续的里程计模型设计提供基础,确保数据采集的频率能够满足实时需求。
Step 2: 添加里程计模型
- 集成里程计模型:
- 在工程代码中添加里程计模型,确保与现有系统的接口兼容。
- 编译与下载:
- 编译项目代码,解决可能出现的编译错误。
- 将编译后的代码下载到机器人控制板,确保上传过程顺利完成。
Step 3: 进行实验与数据验证
- 机器人运动:
- 指令机器人沿X轴前进设定的距离(例如1米),确保运动稳定且无障碍物干扰。
- 数据观察与记录:
- 在机器人运动过程中,实时观察并记录里程计(odom)模型输出的数据。
- 同时,记录机器人起始位置和终点位置的实际坐标。
- 数据对比与验证:
- 对比里程计输出的距离与实际测量的距离,计算误差。
This post is licensed under CC BY 4.0 by the author.