正向运动学
基于T-bot实验指导书——运动学
1.项目名称
移动机器人正运动学实践
2.背景
运动学是研究物体运动状态及其变化的科学,尤其关注位置、速度、加速度等参数。对于移动机器人而言,运动学模型可以帮助我们分析和预测机器人的运动轨迹,从而实现精确的控制和导航。通过运动学分析,机器人可以在动态环境中避免障碍、规划路径并执行任务。
在本实验中,我们将研究全向轮驱动移动机器人的基本运动学原理。通过建立数学模型,我们将进行仿真实验和实际测试,以验证理论模型的准确性和有效性
3.理论知识
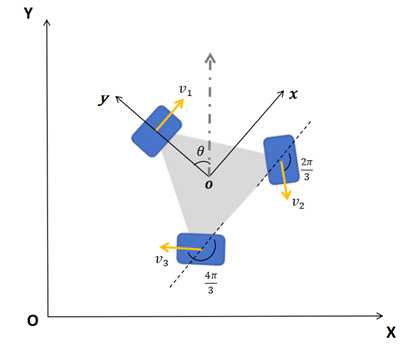
根据上图,建立世界坐标系{XOY},以小车中心为原点建立机器人坐标系{xoy},设每个轮子与车体中心的距离为r,每个轮子与坐标系{xoy}的x轴夹角分别为
\(a_1=0,a_2=\frac{2*pi}{3},a_2=\frac{4*pi}{3}\)
每个轮子速度与车体速度之间的关系为:
\(v_i = v_x \cos(\alpha_i) + v_y \sin(\alpha_i) + r\omega\)
对于三轮全转车体,可以列出三个轮子的运动学方程: \(v_1 = v_x \cos(0) + v_y \sin(0) + r\omega = v_x + r\omega\) \(v_2 = v_x \cos\left(\frac{2\pi}{3}\right) + v_y \sin\left(\frac{2\pi}{3}\right) + r\omega = -\frac{1}{2} v_x + \frac{\sqrt{3}}{2} v_y + r\omega\) \(v_3 = v_x \cos\left(\frac{4\pi}{3}\right) + v_y \sin\left(\frac{4\pi}{3}\right) + r\omega = -\frac{1}{2} v_x - \frac{\sqrt{3}}{2} v_y + r\omega\)
将这些方程写成矩阵形式: \(\begin{pmatrix} v_1 \\ v_2 \\ v_3 \end{pmatrix}^o = \begin{pmatrix} 1 & 0 & r \\ -\frac{1}{2} & \frac{\sqrt{3}}{2} & r \\ -\frac{1}{2} & -\frac{\sqrt{3}}{2} & r \end{pmatrix} \begin{pmatrix} v_x \\ v_y \\ \omega \end{pmatrix}^O\)
4.实验过程
4.1实验前准备
4.1.1. 准备控制板工程代码
- 选择开发环境:
- 确保已选择合适的开发环境,例如 STM32CubeIDE 或 Keil MDK。
- 获取代码库:
- 从 GitHub 或其他代码托管平台下载所需的控制板工程代码。
- 配置项目:
- 根据硬件配置,调整工程设置和代码中的参数。
4.1.2. 准备下载器
- 选择下载器:
- ST-Link:适用于 STM32 系列微控制器。
- J-Link:适用于多种微控制器,支持更广泛的设备。
- 安装驱动:
- 对于 ST-Link,安装 STM32 ST-LINK Utility。
- 对于 J-Link,安装 J-Link Software and Documentation Pack。
- 连接下载器:
- 使用相应的连接线将 ST-Link 或 J-Link
4.2实验步骤
step1.熟悉工程
打开工程文件,观察工程的文件组成,本实验主要关心balance.c,robot_init.c,show.c三个源文件。 其中balance.c是运动学相关的文件,robot_init.c是移动车体相关参数设置文件,show.c是oled的显示文件。
底层控制模块采用stm32+freertos进行控制系统搭建,系统上电后,创建了四个任务,分别是运动控制任务,IMU数据读取任务,显示任务,数据处理任务。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
void start_task(void *pvParameters)
{
taskENTER_CRITICAL(); //Enter the critical area
//Create the task
xTaskCreate(Balance_task, "Balance_task", BALANCE_STK_SIZE, NULL, BALANCE_TASK_PRIO, NULL);
//Vehicle motion control task
xTaskCreate(MPU6050_task, "MPU6050_task", MPU6050_STK_SIZE, NULL, MPU6050_TASK_PRIO, NULL);
//IMU data read task
xTaskCreate(show_task, "show_task", SHOW_STK_SIZE, NULL, SHOW_TASK_PRIO, NULL);
//The OLED display displays tasks
xTaskCreate(led_task, "led_task", LED_STK_SIZE, NULL, LED_TASK_PRIO, NULL);
//LED light flashing task
// xTaskCreate(pstwo_task, "PSTWO_task", PS2_STK_SIZE, NULL, PS2_TASK_PRIO, NULL);
//Read the PS2 controller task
xTaskCreate(data_task, "DATA_task", DATA_STK_SIZE, NULL, DATA_TASK_PRIO, NULL);
//Usartx3, Usartx1 and CAN send data task //
vTaskDelete(StartTask_Handler);
//Delete the start task
taskEXIT_CRITICAL();
//Exit the critical section//Í˳öÁÙ½çÇø
}
step2.测量小车物理参数
本次实验的重点是修改控制任务,添加合适的运动学模型,使得全向移动底盘能运动。首先对于机器人的参数进行配置,如下函数描述,这个函数的参数就是机器人的参数,如电机的减速比,轴距,编码器的精度等等。这些参数需要实际测量,或者通过说明书手册获知。 
请你根据你们自己装配的移动底盘,测量确定轮距,轴距,电机减速比,电机编码器的精度,轮直径参数,并填入以下表格
| 名称 | 值 |
|---|---|
| 轮直径 | |
| 轴距 | |
| 电机减速比 | |
| 编码器精度 |
Step3.完成运动学代码编写
Driver_motor为需要修改的运动学函数,请添加运动学代码,控制小车运动
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
void Drive_Motor(float Vx,float Vy,float Vz)
{
float amplitude=3.5; //Wheel target speed limit
//Speed smoothing is enabled when moving the omnidirectional trolley
Smooth_control(Vx,Vy,Vz); //Smoothing the input speed //
//Get the smoothed data
Vx=smooth_control.VX;
Vy=smooth_control.VY;
Vz=smooth_control.VZ;
//Omni car
//Inverse kinematics
MOTOR_A.Target = Vy + Omni_turn_radiaus*Vz;
MOTOR_B.Target = -X_PARAMETER*Vx - Y_PARAMETER*Vy + Omni_turn_radiaus*Vz;
MOTOR_C.Target = +X_PARAMETER*Vx - Y_PARAMETER*Vy + Omni_turn_radiaus*Vz;
//Wheel (motor) target speed limit //
MOTOR_A.Target=target_limit_float(MOTOR_A.Target,-amplitude,amplitude);
MOTOR_B.Target=target_limit_float(MOTOR_B.Target,-amplitude,amplitude);
MOTOR_C.Target=target_limit_float(MOTOR_C.Target,-amplitude,amplitude);
MOTOR_D.Target=0; //Out of use
}
Step4.控制移动底盘运动
接入蓝牙遥控模块,手机安装apk文件(位于学习通–资源—工具目录),通过蓝牙遥控,观察小车是否运动